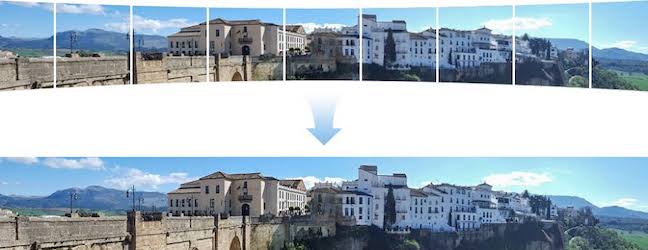

Stitch Panorama of Images
Objective
Brief Description of the approach followed
-
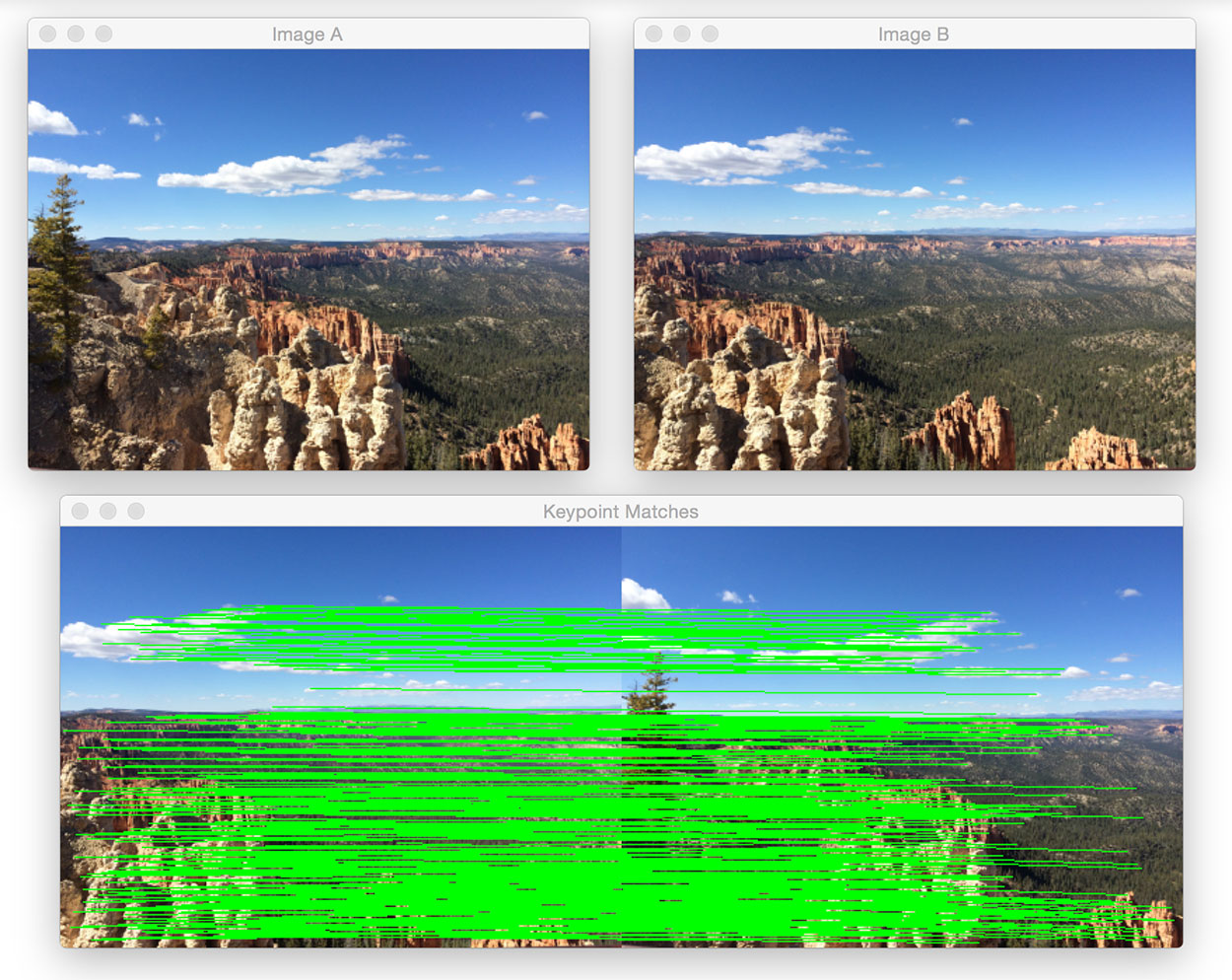
Image Matching
- Get each image and compare with the rest one by one.
- Comparison is done by looking at the similarity in feature points between the two images.
- Rank the similarity between the images
- Pairs with low similarity will be discarded, pairs with high enough similarity will be
kept.
-
Creating the Panorama
- After ranking the images in their order and selecting the base image, we first preprocess all the images for basic exposure correction using global histogram equalisation.
- Images are now resized to a fixed number of rows while maintaining their aspect ratio. This is done to make sure that any two images are always of the same dimension before projection.
- Compute homographies (H1, H2, … Hn) for each image (I1, I2, … In) with respect to the base image. This homography calculation helps us in estimating the size of final stitched image.
- Once we have the final size of the stitched image, we project each image onto this final estimated screen, and compute masks correspondingly to each one of them by appropriate morphological operations. Since we do not stitch images one-by-one, our algorithm is robust and works irrespective of vertical/horizontal scene components.
- We need to make sure that our masks are accurate since our blending procedures are mask-sensitive.
- Introducing the alpha channel (by adding a 4th channel) in the BGR-image to convert it into appropriate BGRA-image.
- Blending results performed on the combination of these images have been summarised in a later part, we make use of Enblend package and Laplacian Pyramids. Exposure correction has been properly handled using local histogram equalisation in each window.
-
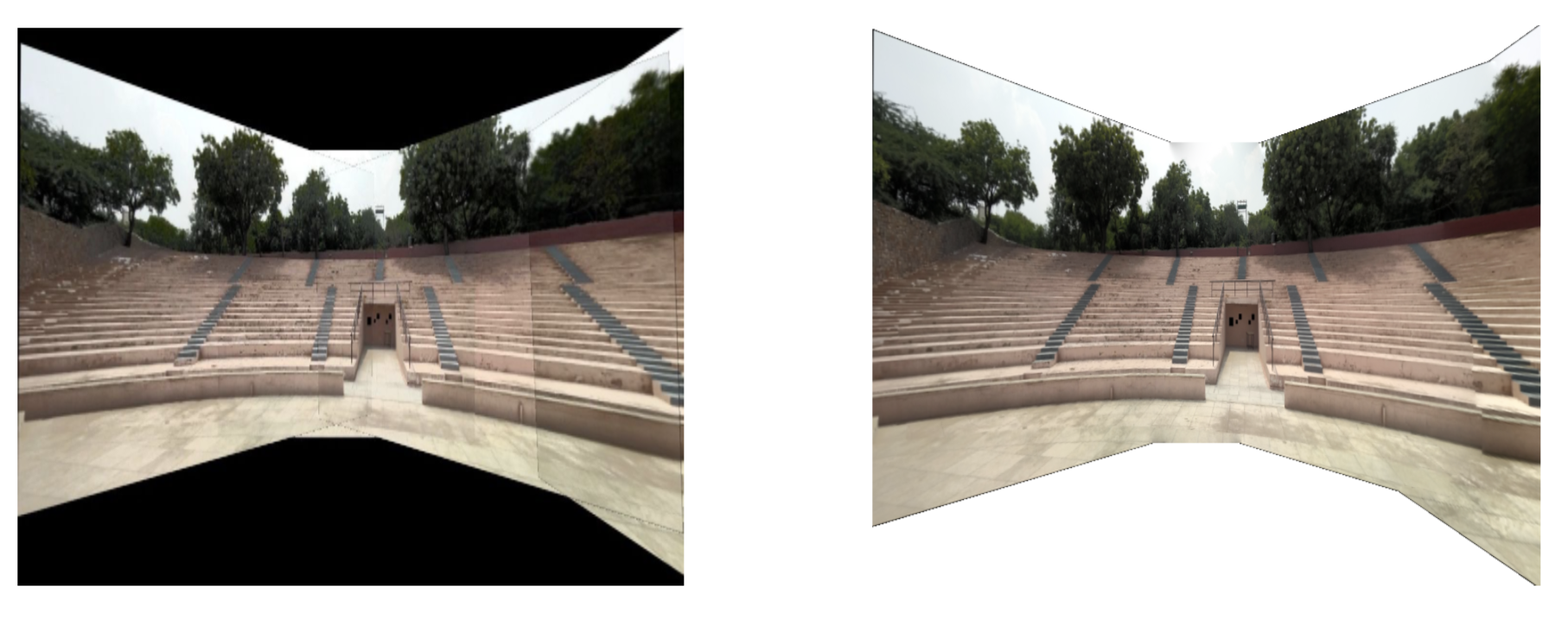
Blending
- Different techniques have been experimented with various blending on a sample input test case.
- Exposure correction has been implemented using adaptive/local histogram equalisation.
- Here are the results from different implementations.
- Input (Set of 4 Images)

- Laplacian Blending (with Exposure Correction)

- Laplacian Blending (without exposure correction)

- Seamless Blending using Poisson Editing

- Feathering (Alpha-Blending) - Naive Histogram Equalization

- Comparison (Alpha Blending v/s Laplacian Blending)
-
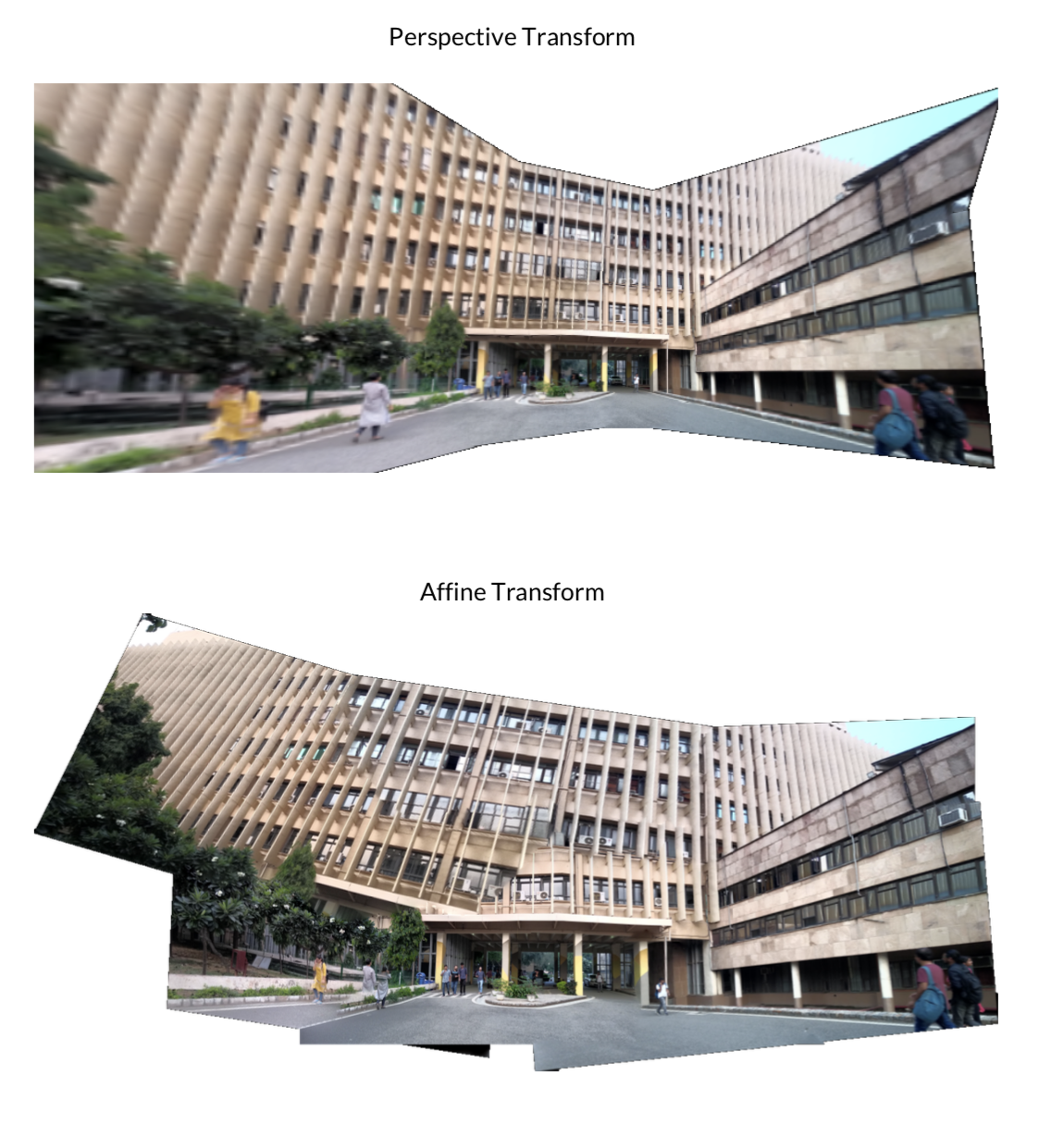
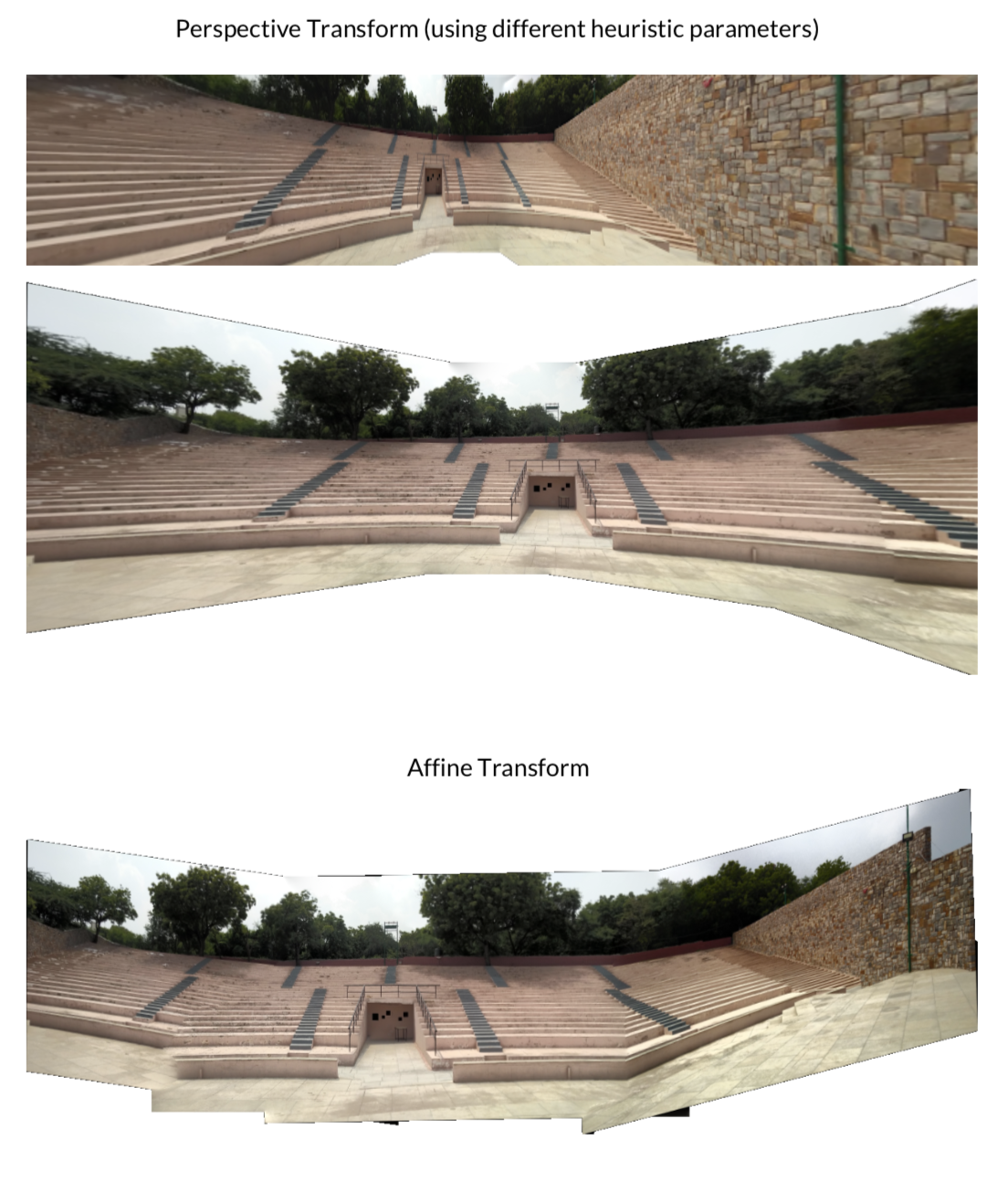
Perspective v/s Affine Transform
- Affine matrix is 2x3, perspective is 3x3; it has less DOF than perspective transformation.
- Homographic projection maps each point in the first image to the corresponding point of the 2nd image. Straight lines remain straight in a homographic projection, and it can map parallel lines to intersecting lines.
- An affine projection, on the other hand, transforms the image with respect to the entire image, and this way the parallelism of lines is always preserved.
- So, if our object is planar but can do out-of-plane rotations, then we need a homography to model that, and in this affine transformation fails since it does not account for out-of-plane transformations.
- For affine, we used
cv.estimateAffine2Dto perform only rotation and translation strictly) - Using
cv.estimateAffinePartial2Dgives better results (since it includes scaling as well)
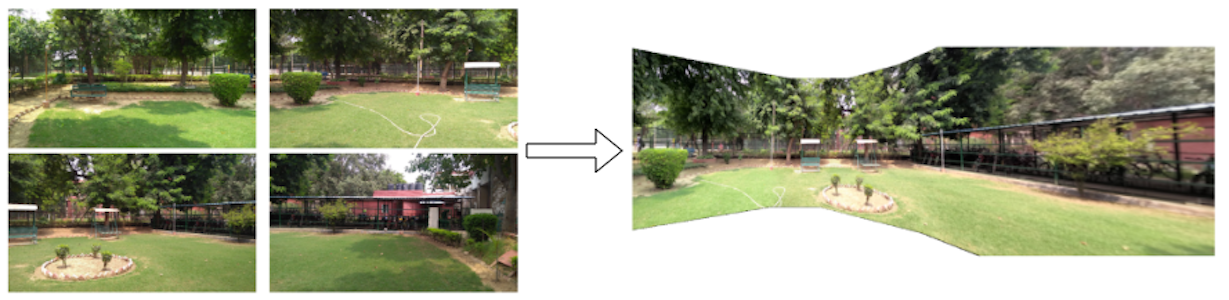
Our algorithm works regardless of the orientation of supplied images i.e. vertical or horizontal, it does not need an order to be given. As long as the collective set represents a scene,our algorithm works.
Other results have been mentioned in this link along with a comprehensive report.